

A camera, when used as a visual sensor, is an integral part of several domains like robotics, surveillance, space exploration, social media, industrial automation, and even the entertainment industry.
For many applications, it is essential to know the parameters of a camera to use it effectively as a visual sensor.
In this post, you will understand the steps involved in camera calibration and their significance.
We are also sharing code in C++ and Python along with example images of checkerboard pattern.
What is camera calibration?
The process of estimating the parameters of a camera is called camera calibration.
This means we have all the information (parameters or coefficients) about the camera required to determine an accurate relationship between a 3D point in the real world and its corresponding 2D projection (pixel) in the image captured by that calibrated camera.
Typically this means recovering two kinds of parameters
- Internal parameters of the camera/lens system. E.g. focal length, optical center, and radial distortion coefficients of the lens.
- External parameters : This refers to the orientation (rotation and translation) of the camera with respect to some world coordinate system.
In the image below, the parameters of the lens estimated using geometric calibration were used to un-distort the image.

Camera Calibration using OpenCV
To understand the process of calibration we first need to understand the geometry of image formation. Click on the link below for a detailed explanation
As explained in the post, to find the projection of a 3D point onto the image plane, we first need to transform the point from world coordinate system to the camera coordinate system using the extrinsic parameters (Rotation  and Translation
and Translation  ).
).
Next, using the intrinsic parameters of the camera, we project the point onto the image plane.
The equations that relate 3D point  in world coordinates to its projection
in world coordinates to its projection  in the image coordinates are shown below
in the image coordinates are shown below
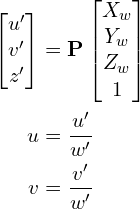
Where,  is a 3×4 Projection matrix consisting of two parts — the intrinsic matrix (
is a 3×4 Projection matrix consisting of two parts — the intrinsic matrix ( ) that contains the intrinsic parameters and the extrinsic matrix (
) that contains the intrinsic parameters and the extrinsic matrix (![[\mathbf{R} \mid \mathbf{t}]](https://learnopencv.com/wp-content/ql-cache/quicklatex.com-88081130564dfc733ee4c580c4af9119_l3.png) ) that is combination of 3×3 rotation matrix and a 3×1 translation vector.
) that is combination of 3×3 rotation matrix and a 3×1 translation vector.
![\begin{align*} \mathbf{P} &= \overbrace{\mathbf{K}}^\text{Intrinsic Matrix} \times \overbrace{[\mathbf{R} \mid \mathbf{t}]}^\text{Extrinsic Matrix} \\[0.5em] \end{align*}](https://learnopencv.com/wp-content/ql-cache/quicklatex.com-035febc5cf4968ee25a10ae730c67e54_l3.png)
As mentioned in the previous post, the intrinsic matrix is upper triangular
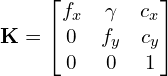
where,
 are the x and y focal lengths ( yes, they are usually the same ).
are the x and y focal lengths ( yes, they are usually the same ).
 are the x and y coordinates of the optical center in the image plane. Using the center of the image is usually a good enough approximation.
are the x and y coordinates of the optical center in the image plane. Using the center of the image is usually a good enough approximation.
 is the skew between the axes. It is usually 0.
is the skew between the axes. It is usually 0.
The Goal of Camera Calibration
The goal of the calibration process is to find the 3×3 matrix , the 3×3 rotation matrix , and the 3×1 translation vector using a set of known 3D points and their corresponding image coordinates . When we get the values of intrinsic and extrinsic parameters the camera is said to be calibrated.
In summary, a camera calibration algorithm has the following inputs and outputs
- Inputs : A collection of images with points whose 2D image coordinates and 3D world coordinates are known.
- Outputs: The 3×3 camera intrinsic matrix, the rotation and translation of each image.
Note : In OpenCV the camera intrinsic matrix does not have the skew parameter. So the matrix is of the form 
Different types of camera calibration methods
Following are the major types of camera calibration methods:
- Calibration pattern: When we have complete control over the imaging process, the best way to perform calibration is to capture several images of an object or pattern of known dimensions from different view points. The checkerboard based method that we will learn in this post belongs to this category. We can also use circular patterns of known dimensions instead of checker board pattern.
- Geometric clues: Sometimes we have other geometric clues in the scene like straight lines and vanishing points which can be used for calibration.
- Deep Learning based: When we have very little control over the imaging setup (e.g. we have a single image of the scene), it may still be possible to obtain calibration information of the camera using a Deep Learning based method.
Camera Calibration Step by Step
The calibration process is explained by a flowchart given below.

Let’s go over these steps.
Step 1: Define real world coordinates with checkerboard pattern

 and
and  axes are along the wall, and the
axes are along the wall, and the  axis is perpendicular to the wall. All points on the checkerboard are therefore on the XY plane ( i.e.
axis is perpendicular to the wall. All points on the checkerboard are therefore on the XY plane ( i.e.  = 0 ).
= 0 ). In the process of calibration we calculate the camera parameters by a set of know 3D points and their corresponding pixel location  in the image.
in the image.
For the 3D points we photograph a checkerboard pattern with known dimensions at many different orientations. The world coordinate is attached to the checkerboard and since all the corner points lie on a plane, we can arbitrarily choose for every point to be 0. Since points are equally spaced in the checkerboard, the  coordinates of each 3D point are easily defined by taking one point as reference (0, 0) and defining remaining with respect to that reference point.
coordinates of each 3D point are easily defined by taking one point as reference (0, 0) and defining remaining with respect to that reference point.
Why is the checkerboard pattern so widely used in calibration?
Checkerboard patterns are distinct and easy to detect in an image. Not only that, the corners of squares on the checkerboard are ideal for localizing them because they have sharp gradients in two directions. In addition, these corners are also related by the fact that they are at the intersection of checkerboard lines. All these facts are used to robustly locate the corners of the squares in a checkerboard pattern.

Step 2 : Capture multiple images of the checkerboard from different viewpoints

Next, we keep the checkerboard static and take multiple images of the checkerboard by moving the camera.
Alternatively, we can also keep the camera constant and photograph the checkerboard pattern at different orientations. The two situations are similar mathematically.
Step 3 : Find 2D coordinates of checkerboard
We now have multiple of images of the checkerboard. We also know the 3D location of points on the checkerboard in world coordinates. The last thing we need are the 2D pixel locations of these checkerboard corners in the images.
3.1 Find checkerboard corners
OpenCV provides a builtin function called findChessboardCorners that looks for a checkerboard and returns the coordinates of the corners. Let’ see the usage in the code block below. Its usage is given by
C++
bool findChessboardCorners(InputArray image, Size patternSize, OutputArray corners, int flags = CALIB_CB_ADAPTIVE_THRESH + CALIB_CB_NORMALIZE_IMAGE )
Python
retval, corners = cv2.findChessboardCorners(image, patternSize, flags)
Where,
| image | Source chessboard view. It must be an 8-bit grayscale or color image. |
| patternSize | Number of inner corners per a chessboard row and column ( patternSize = cvSize (points_per_row, points_per_colum) = cvSize(columns,rows) ). |
| corners | Output array of detected corners. |
| flags | Various operation flags. You have to worry about these only when things do not work well. Go with the default. |
The output is true or false depending on whether a pattern was detected or not.
3.2 Refine checkerboard corners
Good calibration is all about precision. To get good results it is important to obtain the location of corners with sub-pixel level of accuracy.
OpenCV’s function cornerSubPix takes in the original image, and the location of corners, and looks for the best corner location inside a small neighborhood of the original location. The algorithm is iterative in nature and therefore we need to specify the termination criteria ( e.g. number of iterations and/or the accuracy )
C++
void cornerSubPix(InputArray image, InputOutputArray corners, Size winSize, Size zeroZone, TermCriteria criteria)
Python
cv2.cornerSubPix(image, corners, winSize, zeroZone, criteria)
where,
| image | Input image. |
| corners | Initial coordinates of the input corners and refined coordinates provided for output. |
| winSize | Half of the side length of the search window. |
| zeroZone | Half of the size of the dead region in the middle of the search zone over which the summation in the formula below is not done. It is used sometimes to avoid possible singularities of the autocorrelation matrix. The value of (-1,-1) indicates that there is no such a size. |
| criteria | Criteria for termination of the iterative process of corner refinement. That is, the process of corner position refinement stops either after criteria.maxCount iterations or when the corner position moves by less than criteria.epsilon on some iteration. |
Step 4: Calibrate Camera
The final step of calibration is to pass the 3D points in world coordinates and their 2D locations in all images to OpenCV’s calibrateCamera method. The implementation is based on a paper by Zhengyou Zhang. The math is a bit involved and requires a background in linear algebra.
Let’s look at the syntax for calibrateCamera
C++
double calibrateCamera(InputArrayOfArrays objectPoints, InputArrayOfArrays imagePoints, Size imageSize, InputOutputArray cameraMatrix, InputOutputArray distCoeffs, OutputArrayOfArrays rvecs, OutputArrayOfArrays tvecs)
Python
retval, cameraMatrix, distCoeffs, rvecs, tvecs = cv2.calibrateCamera(objectPoints, imagePoints, imageSize)
where,
| objectPoints | A vector of vector of 3D points. The outer vector contains as many elements as the number of the pattern views. |
| imagePoints | A vector of vectors of the 2D image points. |
| imageSize | Size of the image |
| cameraMatrix | Intrinsic camera matrix |
| distCoeffs | Lens distortion coefficients. These coefficients will be explained in a future post. |
| rvecs | Rotation specified as a 3×1 vector. The direction of the vector specifies the axis of rotation and the magnitude of the vector specifies the angle of rotation. |
| tvecs | 3×1 Translation vector. |
Camera Calibration Code
The code for camera calibration using Python and C++ is shared below. However, it is much simpler to download all images and code using the link below.

Python Code for Camera Calibration
Please read through the code comments, they explain what each each step does.
#!/usr/bin/env python
import cv2
import numpy as np
import os
import glob
# Defining the dimensions of checkerboard
CHECKERBOARD = (6,9)
criteria = (cv2.TERM_CRITERIA_EPS + cv2.TERM_CRITERIA_MAX_ITER, 30, 0.001)
# Creating vector to store vectors of 3D points for each checkerboard image
objpoints = []
# Creating vector to store vectors of 2D points for each checkerboard image
imgpoints = []
# Defining the world coordinates for 3D points
objp = np.zeros((1, CHECKERBOARD[0] * CHECKERBOARD[1], 3), np.float32)
objp[0,:,:2] = np.mgrid[0:CHECKERBOARD[0], 0:CHECKERBOARD[1]].T.reshape(-1, 2)
prev_img_shape = None
# Extracting path of individual image stored in a given directory
images = glob.glob('./images/*.jpg')
for fname in images:
img = cv2.imread(fname)
gray = cv2.cvtColor(img,cv2.COLOR_BGR2GRAY)
# Find the chess board corners
# If desired number of corners are found in the image then ret = true
ret, corners = cv2.findChessboardCorners(gray, CHECKERBOARD, cv2.CALIB_CB_ADAPTIVE_THRESH + cv2.CALIB_CB_FAST_CHECK + cv2.CALIB_CB_NORMALIZE_IMAGE)
"""
If desired number of corner are detected,
we refine the pixel coordinates and display
them on the images of checker board
"""
if ret == True:
objpoints.append(objp)
# refining pixel coordinates for given 2d points.
corners2 = cv2.cornerSubPix(gray, corners, (11,11),(-1,-1), criteria)
imgpoints.append(corners2)
# Draw and display the corners
img = cv2.drawChessboardCorners(img, CHECKERBOARD, corners2, ret)
cv2.imshow('img',img)
cv2.waitKey(0)
cv2.destroyAllWindows()
h,w = img.shape[:2]
"""
Performing camera calibration by
passing the value of known 3D points (objpoints)
and corresponding pixel coordinates of the
detected corners (imgpoints)
"""
ret, mtx, dist, rvecs, tvecs = cv2.calibrateCamera(objpoints, imgpoints, gray.shape[::-1], None, None)
print("Camera matrix : \n")
print(mtx)
print("dist : \n")
print(dist)
print("rvecs : \n")
print(rvecs)
print("tvecs : \n")
print(tvecs)
C++ Code
Please read through the comments to understand each step.
#include <opencv2/opencv.hpp>
#include <opencv2/calib3d/calib3d.hpp>
#include <opencv2/highgui/highgui.hpp>
#include <opencv2/imgproc/imgproc.hpp>
#include <stdio.h>
#include <iostream>
// Defining the dimensions of checkerboard
int CHECKERBOARD[2]{6,9};
int main()
{
// Creating vector to store vectors of 3D points for each checkerboard image
std::vector<std::vector<cv::Point3f> > objpoints;
// Creating vector to store vectors of 2D points for each checkerboard image
std::vector<std::vector<cv::Point2f> > imgpoints;
// Defining the world coordinates for 3D points
std::vector<cv::Point3f> objp;
for(int i{0}; i<CHECKERBOARD[1]; i++)
{
for(int j{0}; j<CHECKERBOARD[0]; j++)
objp.push_back(cv::Point3f(j,i,0));
}
// Extracting path of individual image stored in a given directory
std::vector<cv::String> images;
// Path of the folder containing checkerboard images
std::string path = "./images/*.jpg";
cv::glob(path, images);
cv::Mat frame, gray;
// vector to store the pixel coordinates of detected checker board corners
std::vector<cv::Point2f> corner_pts;
bool success;
// Looping over all the images in the directory
for(int i{0}; i<images.size(); i++)
{
frame = cv::imread(images[i]);
cv::cvtColor(frame,gray,cv::COLOR_BGR2GRAY);
// Finding checker board corners
// If desired number of corners are found in the image then success = true
success = cv::findChessboardCorners(gray, cv::Size(CHECKERBOARD[0], CHECKERBOARD[1]), corner_pts, CV_CALIB_CB_ADAPTIVE_THRESH | CV_CALIB_CB_FAST_CHECK | CV_CALIB_CB_NORMALIZE_IMAGE);
/*
* If desired number of corner are detected,
* we refine the pixel coordinates and display
* them on the images of checker board
*/
if(success)
{
cv::TermCriteria criteria(CV_TERMCRIT_EPS | CV_TERMCRIT_ITER, 30, 0.001);
// refining pixel coordinates for given 2d points.
cv::cornerSubPix(gray,corner_pts,cv::Size(11,11), cv::Size(-1,-1),criteria);
// Displaying the detected corner points on the checker board
cv::drawChessboardCorners(frame, cv::Size(CHECKERBOARD[0], CHECKERBOARD[1]), corner_pts, success);
objpoints.push_back(objp);
imgpoints.push_back(corner_pts);
}
cv::imshow("Image",frame);
cv::waitKey(0);
}
cv::destroyAllWindows();
cv::Mat cameraMatrix,distCoeffs,R,T;
/*
* Performing camera calibration by
* passing the value of known 3D points (objpoints)
* and corresponding pixel coordinates of the
* detected corners (imgpoints)
*/
cv::calibrateCamera(objpoints, imgpoints, cv::Size(gray.rows,gray.cols), cameraMatrix, distCoeffs, R, T);
std::cout << "cameraMatrix : " << cameraMatrix << std::endl;
std::cout << "distCoeffs : " << distCoeffs << std::endl;
std::cout << "Rotation vector : " << R << std::endl;
std::cout << "Translation vector : " << T << std::endl;
return 0;
}

